APIの高度なスキャン機能を網羅し、立体構造物への全方位アクセスを可能にしたSmartScanシリーズの多軸ロボットプラットフォームです。
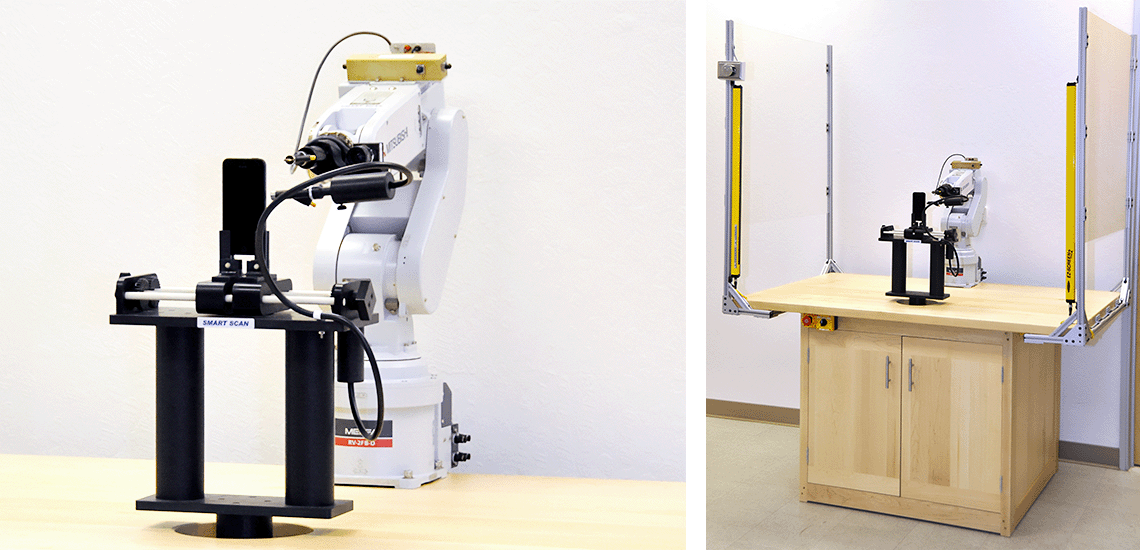
SmartScan 3Dはシリーズで唯一、精密な制御が可能な6軸ロボットと、対象物を360度回転させるDUT保持ジグを採用。従来の平面スキャナではアプローチが困難だった複雑な立体形状を持つ製品や筐体側面、さらには垂直に設置されたデバイスに対しても、最適な角度から精密な自動スキャンを実行します。
EMI、EMS、位相測定、ESDなど、APIの主要な解析メニューをこの3Dプラットフォーム上で統合的に運用可能。3次元的な近傍界データから高精度な遠方界予測(NF-FF)を導き出すなど、設計・検証における高度な電磁界課題を解決します。製品を実稼働状態のまま多角的に検証できる、シリーズで最も柔軟なアプローチを可能にするハイエンドモデルです。
SmartScan 3D 主な特長

6軸ロボットによる全方位3Dスキャナ
精密な制御が可能な6軸ロボットと、対象物を360度回転させるDUT保持ジグを採用。平面スキャナではアプローチが困難だった複雑な立体形状の製品や筐体側面、垂直に設置されたデバイスに対しても、最適な角度から自動スキャンを実行し、製品のあらゆる面をカバーする漏れのない評価を可能にします。
全解析機能の統合と広帯域測定への対応
用途に応じたプローブや測定器の選択により、低周波から高周波までの広い周波数帯をカバー。EMI、EMS、位相、ESD等の全解析技術を本プラットフォームに統合でき、3次元近傍界データを用いた遠方界予測(NF-FF)など高度な課題解決を支援します。複雑な立体構造を持つ車載コンポーネントや通信機器の全周囲測定など、製品レベルでの網羅的なノイズ評価に柔軟に対応します。
高度な3D視覚化と直感的な操作性
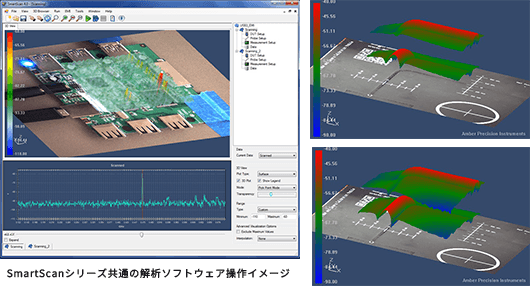
統合カメラやODB++レイアウトデータと連携し、立体構造物の表面を認識。測定結果を3Dモデルや実機写真上に重ね合わせ表示(オーバーレイ)することで、複雑な筐体内部や部品配置とノイズ発生箇所の相関を直感的に把握できます。
実稼働状態を再現する柔軟な評価環境
製品を実際の運用状態(垂直設置や特定の取付角度)のままスキャンできるため、実環境を再現した、確度の高い測定が行えます。シリーズで最も柔軟なアプローチを可能にする多軸モデルとして、シミュレーションと実測を繋ぐ高度な解析環境を提供します。
SmartScan 3D 対応技術一覧
- EMI(電磁妨害波測定)
- 不要放射ノイズの3次元分布測定
- EMS(3D電磁界マッピング)
- 立体構造物の表面および周囲の電磁界解析
- 位相測定・共振スキャン
- 高精度な波形・共振特性解析
- ESD関連評価(放電影響の観測・解析)
- 静電気放電による誤動作箇所の特定
- RFイミュニティ評価支援
- 外来電磁波に対する立体的な耐性評価
- 遠方界予測(NF-FF)
- 3次元近傍界データに基づいた放射特性の解析
- 電流拡散解析
- 基板上のリターンパスおよび電流分布の可視化
SmartScan 3D 主な機能ピックアップ
6軸ロボットによる多角的なアプローチ
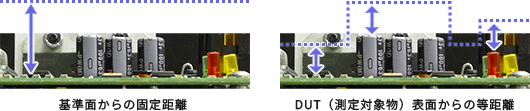
産業用6軸ロボットアームを採用し、垂直面や凹凸のある複雑な筐体形状にも柔軟に対応します。タッチセンサーによる高さ追従(Constant distance scan)により、常に最適な距離と角度を維持した高精度なスキャンが可能です。
360度回転DUT保持ジグ(ターンテーブル)
対象物を360度回転させる専用ジグを標準装備。ロボットアームと同期し、製品の前面・背面・側面を入れ替える手間なく、全周囲データを一括取得できます。
多彩なプローブ・測定技術への対応
低周波から40GHz以上(使用するプローブおよび測定構成による)の広帯域に対応。EMI、位相測定に加え、ESD関連評価やRFイミュニティ評価支援など、主要な解析技術を6軸ロボットによる多角的な制御で実行可能です。複雑な立体形状の製品に対しても、実稼働状態を再現した最適な角度からの評価を実現します。
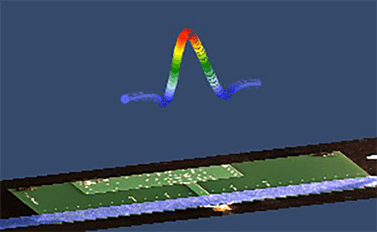
3Dオーバーレイ表示とSAE連携
3Dモデル上に測定結果を直接マッピング。スキャンエリア・エディタ(SAE)により、立体物上でも点・線・面のスキャン範囲を直感的に指定できます。
電磁界強度の自動計算(Field calculation)
スペクトラムアナライザの測定値(dBm/dBV)を、磁界強度(A/m)や電界強度(V/m)へ自動的に変換。3次元的なノイズ分布を定量的に把握し、設計変更の効果を客観的に検証できます。
外部連携とレポート出力
- 主要計測器メーカーに対応
Keysight Technologies、Rohde & Schwarz、Tektronixなどの主要なスペクトラムアナライザとシームレスに連携。既存の設備を活かした自動測定が可能です。 - 高度な解析支援
MATLABをサポートし、取得した3次元データの高度なポスト処理に対応。将来的なライン組み込み等の自動化ニーズにも応える拡張性を備えています。 - レポート自動作成
測定結果はMS Word/Excel形式で即座にレポート化でき、資料作成の工数を削減します。
事例
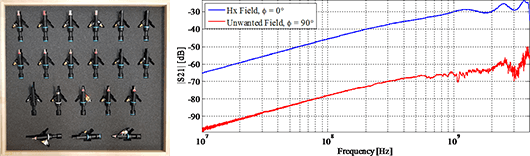
全方位多軸スキャンによる干渉解析
6軸ロボットアームと微小近傍界プローブを組み合わせ、通信不具合(感度抑圧)の原因箇所を特定。スマートフォンや複雑な立体構造を持つ車載ユニット、IoT機器など、対象物の形状を問わずノイズ感度を調査します。
立体構造物に対する電磁界分布の分析
基板単体のパターン設計確認に加え、6軸アームと回転ジグを組み合わせることで、組み上げられた筐体の全周囲(前面・背面・側面)におけるノイズ放射・結合経路を特定します。
- 3D・断面表示
実物の3D CADデータ(ODB++等)上に測定値をオーバーレイ表示。筐体表面や複雑な構造体のどの部分でピークが発生しているかを、あらゆる角度から可視化。 - 多層表示
筐体からの距離を変えた複数のスキャン結果をレイヤーとして重ねて表示。空間的なノイズの伝搬や減衰特性を3次元的に比較解析。
高精度な遠方界予測とシステムレベルのシールド評価
立体スキャンデータから、筐体表面の漏洩ノイズに基づく遠方界放射を予測。ガスケット等の対策効果をシステム全体の影響度として定量化し、開発後期の適合試験における不合格や、大幅な設計手戻りを未然に回避します。
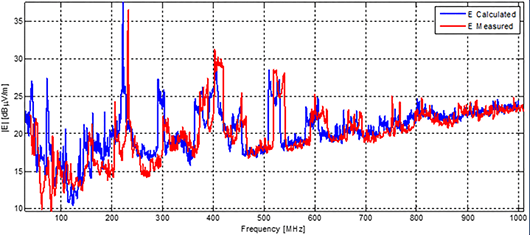
- 遠方界予測:NF-FF(オプション)
3次元近傍界データに基づき、指向性や最大放射パワー等の遠方界特性を算出。電波暗室での実測前に、実機形状に即した放射特性の相関を把握。
- シールド効果評価(SEE)
SEEパッケージを用い、複雑な形状の筐体やシールド材料の性能を検証。ロボット制御による再現性の高い測定を通じ、実機稼働状態における対策効果を評価。